[VIP第1年] 指数:3
[VIP第1年] 指数:3
素材六:机器人力控提升多任务处理能力机器人力控技术能够让机器人在执行多个复杂任务时保持高效和精确。传统工业机器人通常只针对单一任务进行优化,而机器人力控通过动态调整机器人的施力和动作,使其能够在不同任务之间灵活转换,无论是精细装配、力道控制还是碰撞避让,机器人都能够根据具体需求自动调整。这种多任务处理能力极大提升了生产线的柔性和适应性。达宽科技的机器人力控系统,不仅能够应对不同类型的工作任务,还能够优化工作流程,提高生产线的整体效率和多样性,满足客户对生产灵活性和快速响应的需求。机器人力控帮助企业减少了操作中的不稳定因素,达宽科技为客户提供了更可靠的生产方式。江苏协作机器人力控软件

在现代制造业中,高效的供应链管理对于企业的成功至关重要。机器人力控技术不仅能提升生产过程中的效率,还能对整个供应链管理产生积极影响。通过精细控制机器人施加的力,机器人力控技术使得生产过程中的每个环节都能更加精确、高效,确保物料、组件等在生产过程中能够按时到位,并且准确无误地进行处理。达宽科技的机器人力控系统,能够与企业的ERP系统、物流管理系统进行有效集成,优化库存管理、降低库存积压,同时减少因错误操作而引发的供应链瓶颈,极大地提升了整体供应链的效率和响应能力。湖北协作机器人力控优点利用机器人力控,达宽科技让生产线在高负荷运转下依旧保持高效率,为客户带来更稳定的生产周期。。
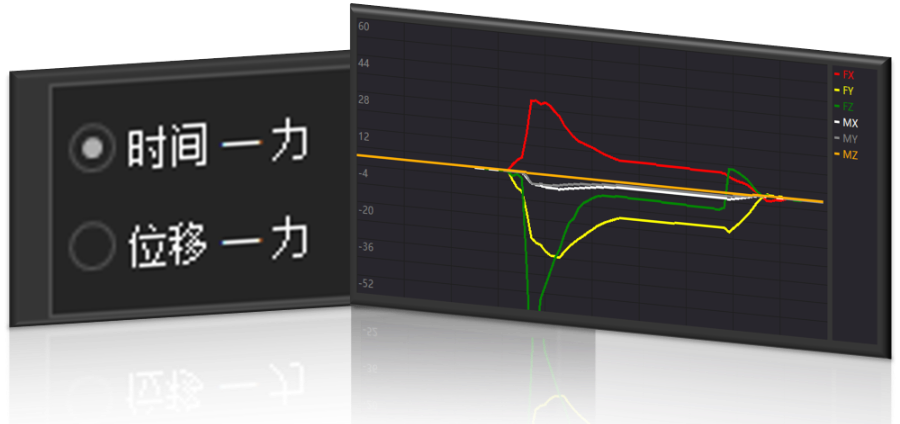
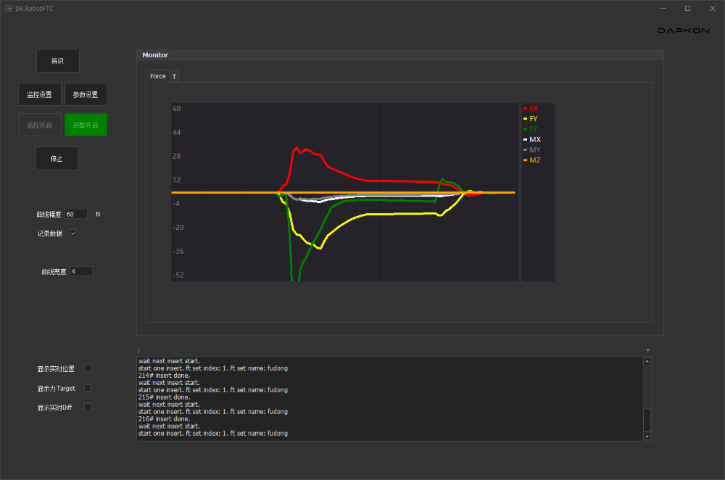
本文我们将以ABB工业机器人为例,介绍如何基于达宽平台级力控大脑装配服务器的多种线束。首先,使用工具坐标系精确示教多个线束接口和多个服务器接口的对应初始位置。我们注意到,该服务器有多种规格的接口,我们演示了HDMI、USB、电源和网线的装配,这四种线束是不同的接口,线束粗细也不同。使用工装夹持线束接口,分别到达指定点位。面对这种装配过程中的微小偏差和不规则性,达宽机器人力控系统采用了基于柔性力控的自适应补偿技术。这项技术利用六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少力,从而让接口能够准确对接。
在实际应用中,机器人力控能够自适应地处理不同的负载和不同的工况,机器人力控能够处理不同类型的工件时保持比较好的操作表现。这种适应性使得机器人能够应对多变的生产环境,不再局限于简单的重复性工作,而能处理更加复杂和精细的任务。使用机器人力控系统,还能够有效降低生产过程中的废品率。机器人力控系统能够通过力传感器精细判断所需的施力,避免了因过度或不足施力导致的生产错误,从而降低了资源浪费,提升了生产效率和资源利用率。机器人力控技术减少了传统人工操作中的误差,达宽科技的创新解决方案确保生产过程的高效性和稳定性。
随着协作机器人(cobot)的普及,机器人与人类的合作已成为现代制造业的重要趋势。机器人力控技术在这种合作中发挥着至关重要的作用。通过精确控制机器人施加的力量,机器人能够更加安全、稳定地与人类操作员共同工作。机器人力控技术可以实时感知操作环境的变化,避免机器人与人类发生意外碰撞,从而保障员工的安全。同时,机器人能够在需要时减小操作力,避免伤害。达宽科技的机器人力控系统提供了更为灵活的协作模式,使得机器人与人类之间的配合更加高效、和谐,为企业带来更加智能化的生产环境。机器人力控技术通过调节,帮助企业提高生产线的工作效率,达宽科技为客户提供更高效安全的自动化操作。江苏协作机器人力控软件
通过机器人力控,达宽科技提升了生产线的自动化程度,帮助企业实现生产过程的高效率。江苏协作机器人力控软件
机器人力控技术的比较大优势之一是提升生产效率。传统的工业机器人通过预设的路径和动作进行操作,但这种方法在面对复杂的环境或不规则的工作件时,容易出现效率低下和操作不精确的问题。而机器人力控技术通过实时感知外部环境的力量变化,能够根据实际情况灵活调整动作和施力,从而提高工作效率。达宽科技作为机器人力控领域的者,提供的力控解决方案,不仅能够加速生产过程,还能提高机器人的适应性。机器人力控能够精确地应对不同重量、尺寸、硬度的工件,确保机器人能够在多变的生产环境中持续稳定地工作,避免了传统生产方式中的瓶颈和低效。江苏协作机器人力控软件
文章来源地址: http://smdn.chanpin818.com/ruanjian/rjkfgs/deta_26181026.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。