[VIP第1年] 指数:3
[VIP第1年] 指数:3
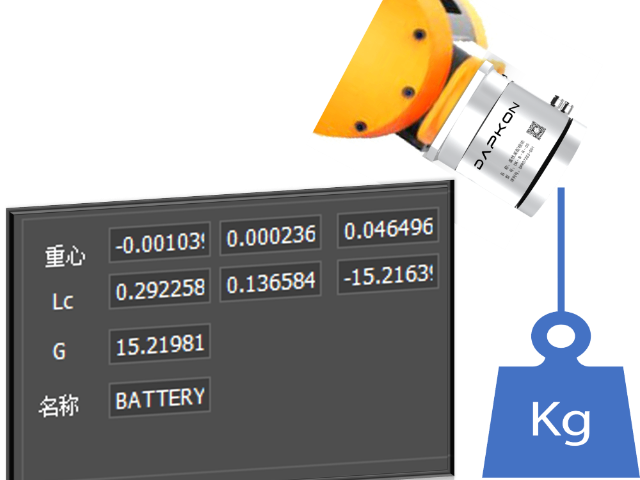
机器人力控技术,也称为力反馈控制技术,是指在机器人的操作过程中,通过将传感器检测到的力或力矩信息,反馈到控制系统,通过力控算法的解算,进而调整机器人的动作,以实现精确力控制的一种技术。想象一下,如果你的手能感觉到每一个细微的触感,并根据这些触感调整动作,这就是力控技术想要达到的效果。机器人力控技术的主要原理可以概括为以下几个步骤:1,力觉感知:利用力传感器检测机器人与外界环境的交互力。2,信号处理:将感知到的力信号进行一系列的滤波处理,去除一些不必要的噪音,然后将信号传输到控制系统。3,控制决策:根据信号和预设的控制算法,计算规划出机器人下一步的动作。4,执行动作:将控制指令传递给机器人的执行机构,实现精确的动作调整。达宽科技的机器人力控系统帮助企业实现了更高效的生产流程,提升了整体工作效率和生产可靠性。河南协作机器人力控调试
随着市场需求的多样化,个性化定制已成为许多行业的重要趋势。机器人力控技术为实现高度定制化的生产提供了技术支持。通过精确的力控制和灵活的操作模式,机器人能够根据不同的生产要求执行精细化操作。这种定制化生产不仅体现在产品的外观、功能上,还体现在生产过程中的每个细节。达宽科技的机器人力控系统能够根据客户需求进行实时调整,确保每个定制产品的高质量和精确度。这使得企业能够在保持高效率的同时,更好地满足市场对个性化产品的需求,提升了市场竞争力。湖南工业机器人力控搬运机器人力控系统为企业带来了高效、精确、稳定的生产模式,达宽科技的技术使得自动化生产更加智能化和安全。

达宽科技的机器人力控系统是一个平台级的“力控大脑”,它能够与主流品牌机器人(ABB、KUKA、FANUC、SIASUN、KEBA、UR等)、主流六维力矩传感器厂商(ATI、SCHUNK、ME、KUNWEI、SRI等)适配,不仅能实现与机器人运动控制器之间的实时通讯(2ms/4ms/8ms),更整合了力/矩采集、负载辨识、策略控制、力控逻辑控制、运动规划、安全报警、数据保存等多种功能,达宽科技的力控系统提供了更稳定可靠、功能更、界面更友好统一的方案,降低了力控技术的使用门槛,促进机器人在更多领域的渗透。
素材六:机器人力控提升多任务处理能力机器人力控技术能够让机器人在执行多个复杂任务时保持高效和精确。传统工业机器人通常只针对单一任务进行优化,而机器人力控通过动态调整机器人的施力和动作,使其能够在不同任务之间灵活转换,无论是精细装配、力道控制还是碰撞避让,机器人都能够根据具体需求自动调整。这种多任务处理能力极大提升了生产线的柔性和适应性。达宽科技的机器人力控系统,不仅能够应对不同类型的工作任务,还能够优化工作流程,提高生产线的整体效率和多样性,满足客户对生产灵活性和快速响应的需求。机器人力控技术提升了生产效率,达宽科技为企业提供了更加安全可靠的自动化解决方案。

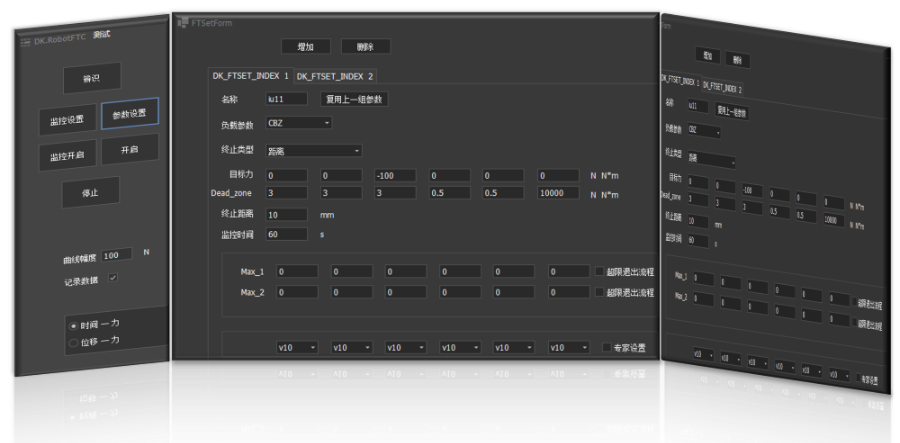
达宽科技的机器人力控系统以其强大的兼容性而著称,能够实时准确地读取来自不同品牌的力传感器数据。系统还能与包括ABB、KUKA、FANUC等众多品牌及型号的机器人实现实时通讯。这种高度的兼容性确保了不同设备之间的无缝协同作业,进一步提升了生产流程的灵活性和效率。同时,系统内置了多组力控参数和负载辨识参数的保存功能,用户可以为每组参数设定个性化的终止条件。这种智能参数管理功能简化了配置过程,确保了在力控调节过程中对负载特性的一致性理解。
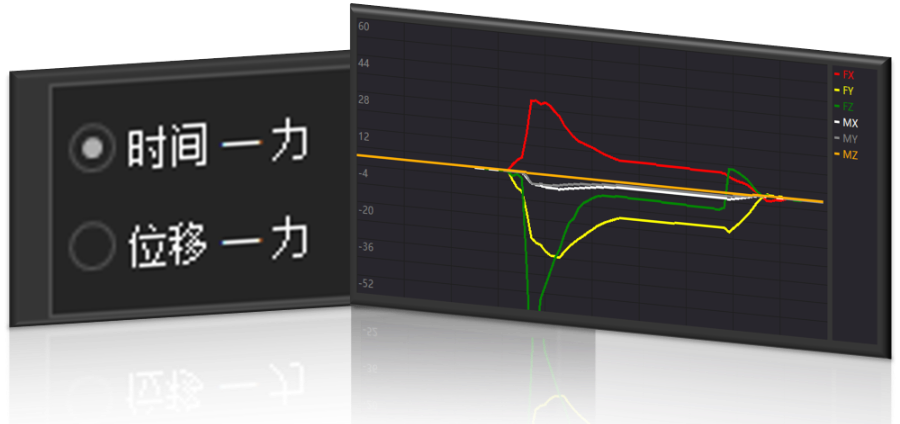
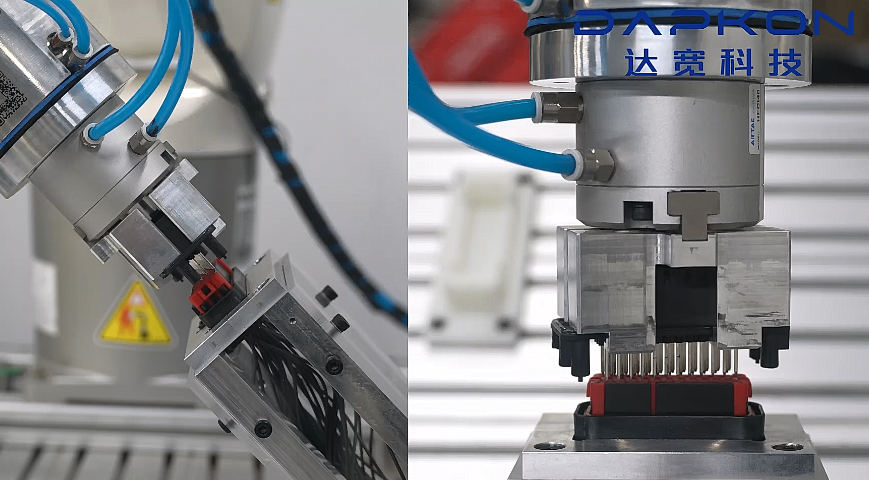
达宽科技的机器人力控平台不仅提升了机器人在复杂任务中的表现,还通过实时力位监测技术,确保装配过程中的每一个动作都达到毫厘之精。这种高精度的控制能力有效预防和减少了因力位误差导致的质量问题。达宽科技的解决方案通过强大的负载辨识能力和灵活的力控调节功能,为用户提供了一种高效、安全且易于操作的机器人控制方式。无论是在工业制造、精密装配还是柔性生产中,达宽科技的机器人力控技术都能帮助用户节省时间、提高效率,并确保产品的高质量输出。 机器人力控技术能够在多种应用场景下提供力学控制,达宽科技的系统有效提升生产效率与工作质量。广东协作机器人力控定制
达宽科技的机器人力控技术提升了机器人的操作稳定性,帮助企业快速适应生产需求,提升工作效率。河南协作机器人力控调试
机器人力控还可以与其他智能化系统进行深度集成,实现更为复杂的任务调度和协同工作。在多机器人协同作业时,力控技术可以协调各个机器人的力量,确保任务的顺利完成,进一步提高了自动化系统的整体效率。总的来说,机器人力控技术的应用不仅带来了生产效率和安全性的提升,还为企业带来了更多的创新机会。作为行业中的佼佼者,达宽科技凭借其先进的机器人力控解决方案,为全球制造业提供了强大的技术支持,帮助更多企业实现了自动化转型和智能化升级。河南协作机器人力控调试
文章来源地址: http://smdn.chanpin818.com/ruanjian/rjkfgs/deta_26284227.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。