[VIP第1年] 指数:3
[VIP第1年] 指数:3
为了进一步提高安全,达宽机器人力控系统引入了力超限报警系统。该系统在每个监测方向上设定了两级报警阈值,并配备了超限自动停止功能。这样,一旦检测到施加的力超过设定的安全界限或操作时间超出预定时长,系统将立即发出警告,并自动中断操作,同时通知相关工作人员。在进行机器人座椅熨烫作业前,须在示教器中预先设定一条自动化熨烫路径。操作开始时,机器人会将熨斗引导至座椅表面,缓慢靠近并施加初步的力,然后沿着预设轨迹在座椅上移动。在此过程中,达宽机器人力控系统会依据实时反馈微调熨烫力度。例如,座椅的某些区域可能因褶皱或其他因素导致表面存在误差。利用达宽力控系统的自适应补偿技术,能够自动调整机器人施加的力度,以适应微小的偏差和不规则性。借助机器人力控,达宽科技优化了生产过程,帮助企业节省时间,提高工作效率和产品质量。江苏协作机器人力控供应商

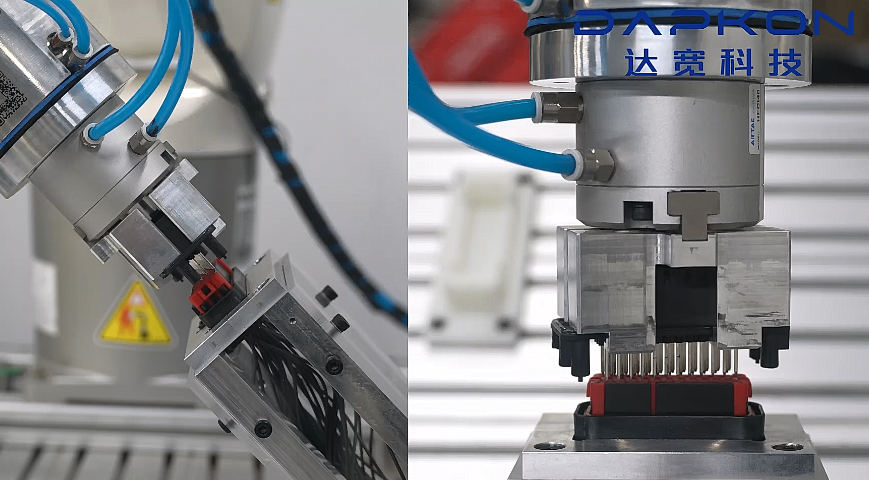
本文我们将以KUKA工业机器人为例,介绍如何基于达宽平台级机器人力控大脑装配汽车ECU控制器插头35p线束。首先,使用工具坐标系精确示教线束接口的初始位置。35针脚连接器因其众多的针脚和较大的接触面积,在传统装配过程中会产生较大的干扰外力。这不仅要求机器人具有极高的装配精度,而且装配过程中的干扰外力也可能造成影响。例如,在装配过程中,如果因来料误差等原因,机器人施加过大的力量,有损坏连接器的风险。如何在不损坏连接器的前提下,精确地将线束连接到指定位置?在测试过程中,我们发现依赖位置判断可能导致在工装偏移或误差时损坏连接器。而依赖力判断可能因干扰外力误判而认为已到达指定位置,但这种方法能确保连接器不受损害,提升安全性。因此,结合位置和力的双重判断是更为稳妥的解决方案。江苏协作机器人力控供应商机器人力控技术减少了传统人工操作中的误差,达宽科技的创新解决方案确保生产过程的高效性和稳定性。
机器人力控技术的比较大优势之一是提升生产效率。传统的工业机器人通过预设的路径和动作进行操作,但这种方法在面对复杂的环境或不规则的工作件时,容易出现效率低下和操作不精确的问题。而机器人力控技术通过实时感知外部环境的力量变化,能够根据实际情况灵活调整动作和施力,从而提高工作效率。达宽科技作为机器人力控领域的者,提供的力控解决方案,不仅能够加速生产过程,还能提高机器人的适应性。机器人力控能够精确地应对不同重量、尺寸、硬度的工件,确保机器人能够在多变的生产环境中持续稳定地工作,避免了传统生产方式中的瓶颈和低效。
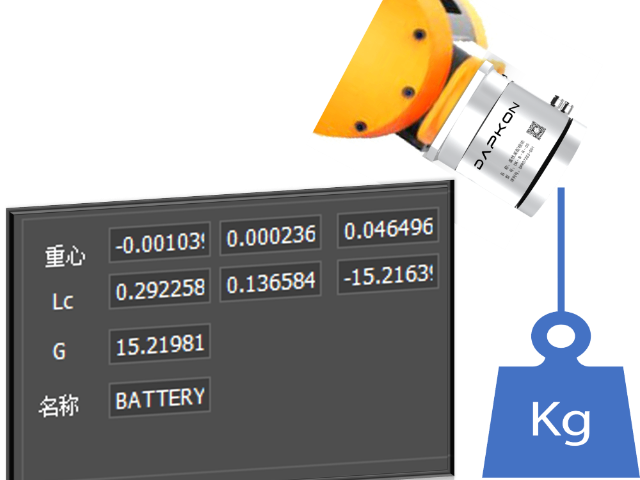
达宽机器人力控系统采用力位混合判断技术,并引入超限报警机制,将力和位移设置两级报警阈值。同时,设置线束装配成功时的力和位移判断依据。这解决了如何判断装配成功,如何判断失败,如何保护连接器的问题。接下来,我们需要关注如何优化装配过程,以应对微小偏差和不规则性,从而提高产品的合格率。面对装配过程中,线束这类可能出现的微小偏差和不规则性的工件,达宽力控系统采用了基于柔性力控的自适应补偿技术。这项技术依托六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少干扰外力,从而让接口能够准确对接。同时,在装配过程中,该技术通过调整机器人的位置和姿态,减少干扰外力,防止因某一角度装配时干扰外力过大而装配失败。通过机器人力控技术,达宽科技帮助企业提升生产线的自动化水平,减少了人为操作风险,增强了生产的安全性。

对于许多高精度、高复杂度的产品制造,传统的自动化技术难以满足要求。机器人力控技术的出现,彻底改变了这一局面。通过实时调整机器人施加的力量,机器人力控技术能够在不同行业中执行复杂的装配和精密制造任务。例如,在电子产品、汽车制造等领域,机器人力控能够精确控制装配过程中每一部分的接触力度,避免因力道过大或过小导致组件损坏。达宽科技的机器人力控解决方案,使得企业能够在这些高精度要求的生产环境中保持一致性和精度,提升了生产效率和产品质量。通过机器人力控,达宽科技帮助企业提升了生产线的安全性和稳定性,降低了停机风险。内蒙古工业机器人力控优势
借助达宽科技的机器人力控技术,用户能够提高产品的一致性和精度,确保生产质量稳定可靠。江苏协作机器人力控供应商
随着环保意识的提升,许多企业开始关注绿色环保生产方式。机器人力控技术在这一领域也发挥了积极作用。通过精确控制机器人施加的力量,机器人力控不仅提高了生产精度,还减少了资源浪费。机器人在执行任务时能够根据实际需求调整施力,避免了过多的能源消耗和材料浪费,推动了更为环保的生产方式。此外,机器人力控技术还可以有效降低生产过程中的废品率,进一步减少了废弃物和资源的浪费。达宽科技的机器人力控技术,凭借其高效的控制能力,助力企业实现绿色生产,推动了智能制造与可持续发展的结合。江苏协作机器人力控供应商
文章来源地址: http://smdn.chanpin818.com/ruanjian/rjkfgs/deta_26368959.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。