[VIP第1年] 指数:3
[VIP第1年] 指数:3
随着市场需求的多样化,个性化定制已成为许多行业的重要趋势。机器人力控技术为实现高度定制化的生产提供了技术支持。通过精确的力控制和灵活的操作模式,机器人能够根据不同的生产要求执行精细化操作。这种定制化生产不仅体现在产品的外观、功能上,还体现在生产过程中的每个细节。达宽科技的机器人力控系统能够根据客户需求进行实时调整,确保每个定制产品的高质量和精确度。这使得企业能够在保持高效率的同时,更好地满足市场对个性化产品的需求,提升了市场竞争力。机器人力控技术助力企业智能化转型,达宽科技的专业方案为用户提供高效的自动化解决方案。云南工业机器人力控技术指导

素材六:机器人力控提升多任务处理能力机器人力控技术能够让机器人在执行多个复杂任务时保持高效和精确。传统工业机器人通常只针对单一任务进行优化,而机器人力控通过动态调整机器人的施力和动作,使其能够在不同任务之间灵活转换,无论是精细装配、力道控制还是碰撞避让,机器人都能够根据具体需求自动调整。这种多任务处理能力极大提升了生产线的柔性和适应性。达宽科技的机器人力控系统,不仅能够应对不同类型的工作任务,还能够优化工作流程,提高生产线的整体效率和多样性,满足客户对生产灵活性和快速响应的需求。广西工业机器人力控供应商达宽科技的机器人力控技术提升了机器人的操作稳定性,帮助企业快速适应生产需求,提升工作效率。

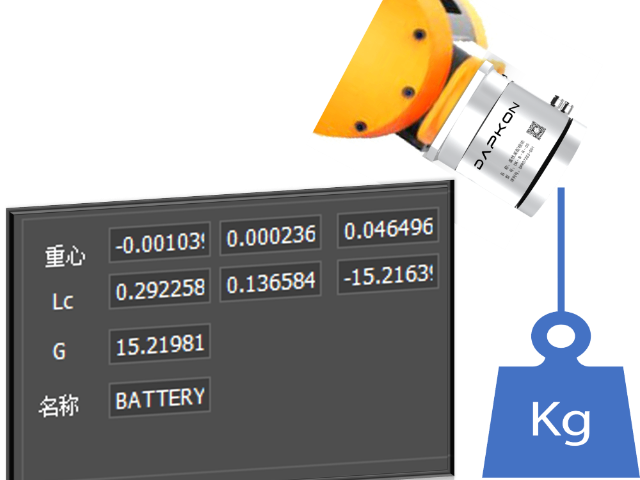
本文我们将以KUKA工业机器人为例,介绍如何基于达宽平台级机器人力控大脑装配汽车ECU控制器插头35p线束。首先,使用工具坐标系精确示教线束接口的初始位置。35针脚连接器因其众多的针脚和较大的接触面积,在传统装配过程中会产生较大的干扰外力。这不仅要求机器人具有极高的装配精度,而且装配过程中的干扰外力也可能造成影响。例如,在装配过程中,如果因来料误差等原因,机器人施加过大的力量,有损坏连接器的风险。如何在不损坏连接器的前提下,精确地将线束连接到指定位置?在测试过程中,我们发现依赖位置判断可能导致在工装偏移或误差时损坏连接器。而依赖力判断可能因干扰外力误判而认为已到达指定位置,但这种方法能确保连接器不受损害,提升安全性。因此,结合位置和力的双重判断是更为稳妥的解决方案。
机器人力控技术的应用,不仅提升了生产效率,还为企业的产品开发和创新提供了支持。由于机器人能够根据不同的生产需求灵活调整力和动作,它可以在复杂的生产任务中保持极高的精度和稳定性,这为新产品的研发提供了更多的可能性。无论是在制造高精度零部件、进行复杂的装配操作,还是进行创意设计的实验性生产,机器人力控都能提供强大的技术保障。达宽科技的机器人力控技术,凭借其先进的控制系统和高精度的操作能力,帮助企业在新产品开发过程中快速验证生产工艺,缩短研发周期,提升创新能力,从而增强企业的市场竞争力。达宽科技的机器人力控解决方案提升了生产过程中的操作灵活性,为企业创造更高的效益。

对于许多高精度、高复杂度的产品制造,传统的自动化技术难以满足要求。机器人力控技术的出现,彻底改变了这一局面。通过实时调整机器人施加的力量,机器人力控技术能够在不同行业中执行复杂的装配和精密制造任务。例如,在电子产品、汽车制造等领域,机器人力控能够精确控制装配过程中每一部分的接触力度,避免因力道过大或过小导致组件损坏。达宽科技的机器人力控解决方案,使得企业能够在这些高精度要求的生产环境中保持一致性和精度,提升了生产效率和产品质量。机器人力控技术增强了机器人对外部变化的应对能力,达宽科技的技术让自动化生产更加高效。广西工业机器人力控供应商
达宽科技的机器人力控技术能够智能化地控制机械臂的力度,帮助客户实现精确的操作和更高效的生产目标。云南工业机器人力控技术指导
本文我们将以ABB工业机器人为例,介绍如何基于达宽平台级力控大脑装配服务器的多种线束。首先,使用工具坐标系精确示教多个线束接口和多个服务器接口的对应初始位置。我们注意到,该服务器有多种规格的接口,我们演示了HDMI、USB、电源和网线的装配,这四种线束是不同的接口,线束粗细也不同。使用工装夹持线束接口,分别到达指定点位。面对这种装配过程中的微小偏差和不规则性,达宽机器人力控系统采用了基于柔性力控的自适应补偿技术。这项技术利用六维力传感器实时监测力的微小变化,并控制机器人实时微调其位置和姿态,在特定方向上减少力,从而让接口能够准确对接。云南工业机器人力控技术指导
文章来源地址: http://smdn.chanpin818.com/ruanjian/rjkfgs/deta_26549280.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。